– Research subjects
リアルタイムOSとROSを用いたETロボコン向けソフトウェアプラットフォームの開発
学部4年 樋山一樹
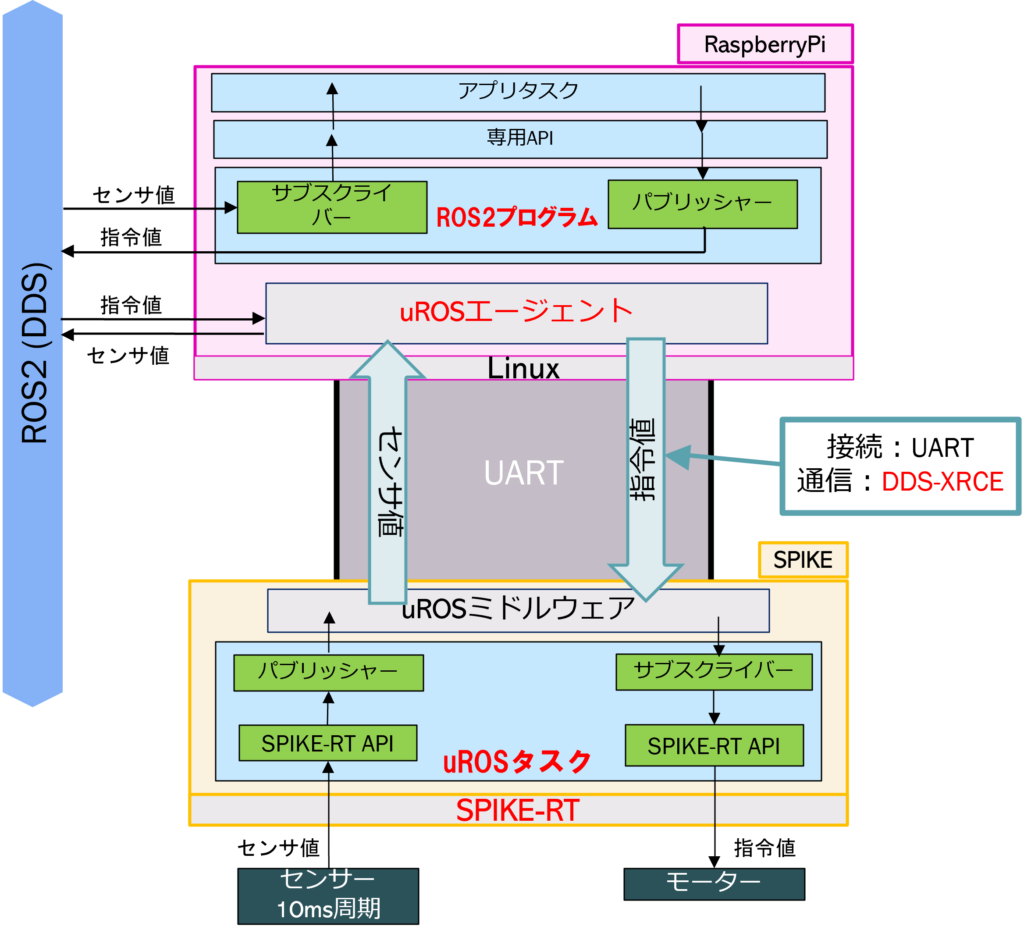
現在のETロボコンにおけるアプリの開発環境は,処理速度が遅い点や通信の汎用性が乏しい点などの問題を抱えています.そこで私はリアルタイムOSとROSを用いた、ETロボコン用走行ロボットの制御アプリ開発のための開発環境の開発を実施しています.
ROSとは自動運転やロボット制御のシステム開発の分野において利用されている,近年注目の技術です(リアルタイムOSについてはこちら).このROSとリアルタイムOSを利用した開発環境を開発することで, よりリアルタイム性に優れ,通信の汎用性が高いETロボコン用の開発環境を提供できると考えています.
また,このプラットホームをROS2の教材として活用するためmicro-ROSファームウェアの自動生成ツールを作成しました.このツールはHubに接続するデバイスの情報を設定ファイルを記入するだけでmicro-ROSファームウェアとカスタムメッセージ定義パッケージを自動生成するため,ユーザはHub側の構成に縛られずともROS2のプログラミングに専念できます.
リンク:開発したプラットホーム(RasPike-ROS),自動生成ツール
また,仮想環境(XenやJailhouse)に関するテーマの研究も行ってます.興味がある方は見学にお越しください.
実行の様子
今回作成したROS使用のアプリケーションの開発環境を用いて,実際にアプリケーションを作成した際の実験動画です.
アプリケーションは走行ロボットをライントレース(PID制御)させるプログラムになっています.
ギャラリー


組込みシステム向け軽量ROS環境の産業ネットワーク向け拡張
学部4年 竹内結斗
ロボットや自動運転にプログラミング及び通信のフレームワークであるROS2が使われています.ROS2は,異なるコンピュータ上の複数のアプリケーションを連携することが可能であり,これらアプリケーション間の通信は,DDSと呼ばれる通信ミドルウェアにより実現されます.しかし,小規模な組込みシステムではDDSを使用できません.そこで,小規模な組込みシステムでROS2を使用可能にするmicro-ROSが開発されています.通常はUARTで通信される一方,主に車載やFAのネットワークとして使用されるCAN-FDでの通信も可能です.CAN-FDはメッセージのIDによる優先度制御が可能ですが,現状はメッセージが同じIDを使っているので,メッセージ毎にIDを振り分ける必要があると考えます.その仕組みを実現する事が本研究の研究目的です.



複数のOSSで構成されている組込みシステムの性能評価
学部4年 大野佑真
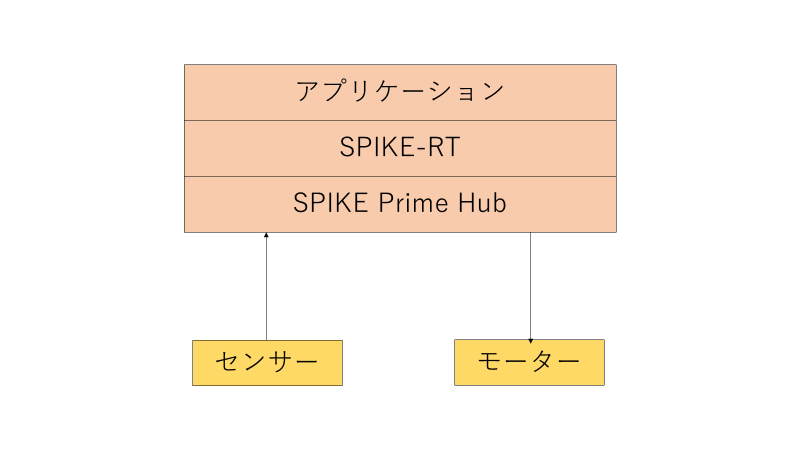
ETロボコンで使われているLEGO SPIKE Primeはリアルタイム性がなかったりC言語に対応していなかったりなどの問題があります.
それらの問題を解決するために作られたソフトウェアプラットフォームであるSPIKE-RTのリアルタイム性はどうなのか,元の環境より優れているのか,問題点は何かなどを評価しています.
具体的にはセンサーが反応してからモーターが回りだすまでの時間の差を様々な条件で計測するために,計測やデータの整理の自動化をしています.
SPIKE-RTは複数のOSS(オープンソースソフトウェア)で構成されており,この研究はほかの複数のOSSで構成されている組込みシステムの研究につながります.
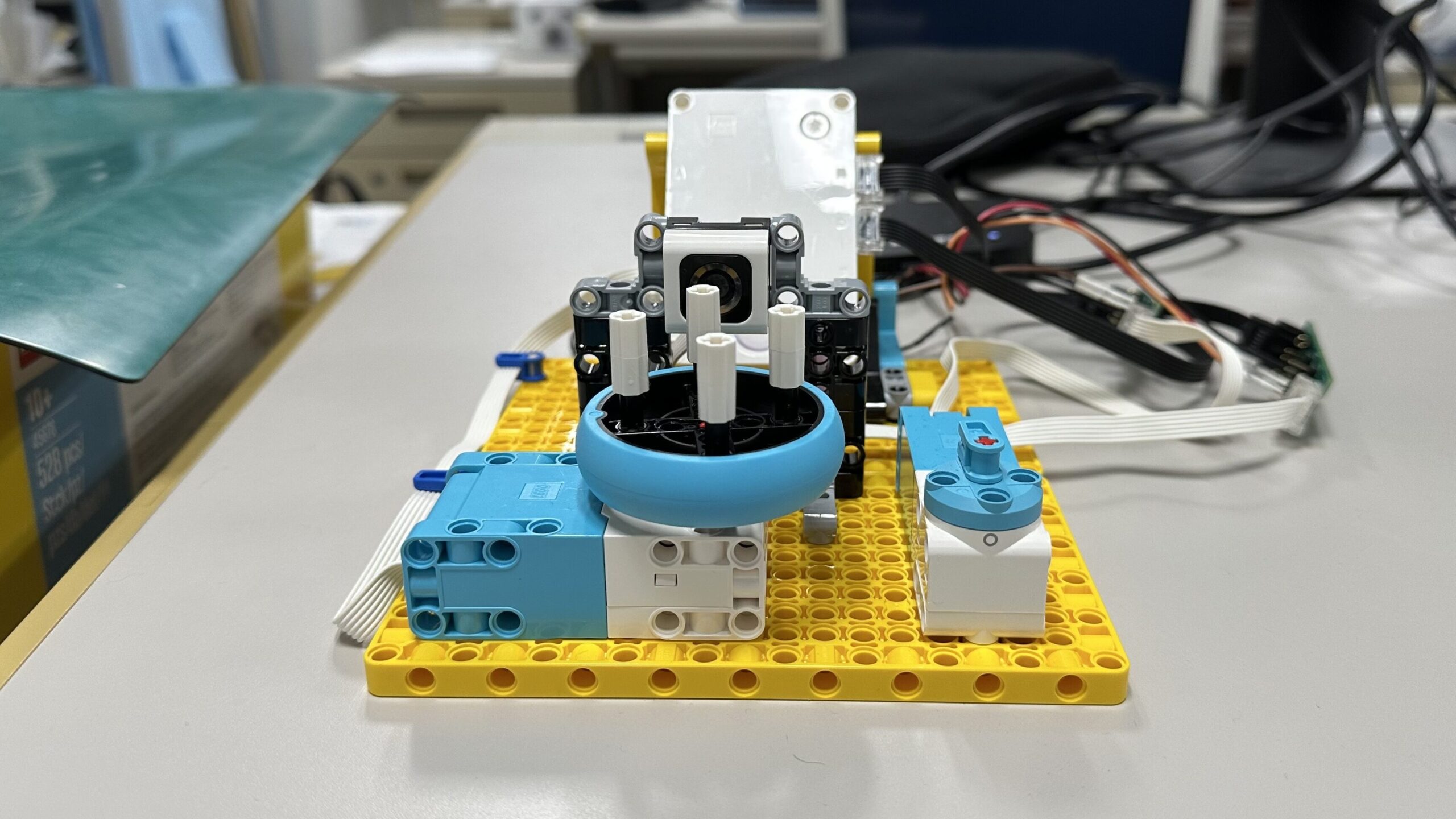
計測の様子
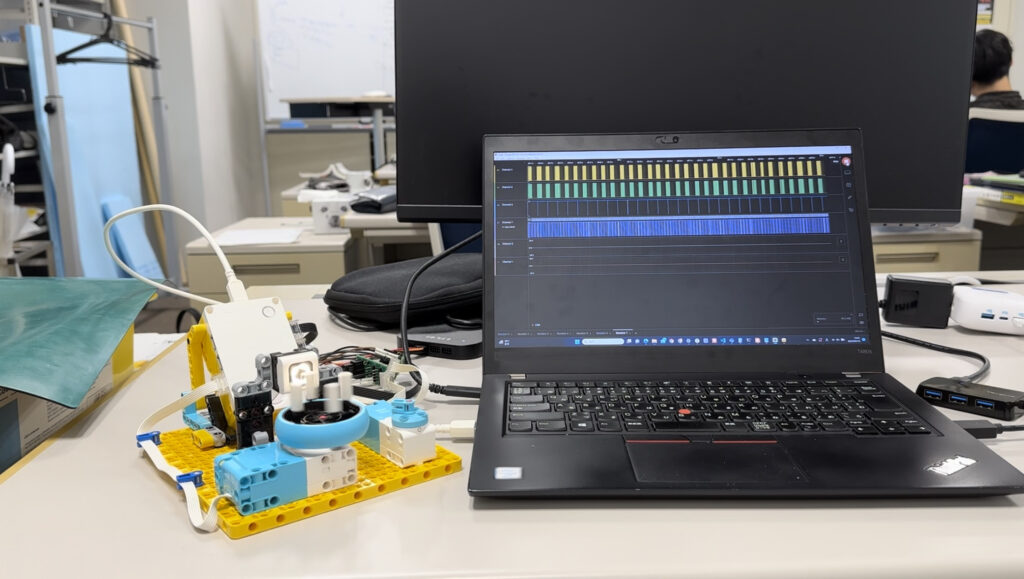
左側では大きいモーターにつながった4本の白い棒をセンサーが検知したときに小さいモーターが回っています.
パソコンではロジックアナライザというアプリでセンサーと小さいモーターの信号を取得しています.
ロジックアナライザで取得したデータを作ったプログラムで解析し,モーターの応答時間を計算します.
Rustの高信頼組込みシステムへの適用性評価
学部4年 内田裕貴
現在,組み込みシステムの開発には,C言語が広く使用されていますが,C言語には安全性の問題があるとされています.
そこで,C言語の問題点を改善し,さらに性能を重視して開発された,Rustというプログラミング言語を学習し,実験を行っています.
独自の概念や記法があり,C言語と比べて難しく感じますが,Cプログラムで起こるような未定義動作はなく,性能面でも大きく劣るようなことはないため,今後の組み込みシステム開発では,Rustが使われる可能性も十分にあると考えられます.
ギャラリー

実行の様子
IoT 機器向け軽量スクリプト言語の消費電力に関する評価
学部4年 佐竹笠輔
IoT技術の発展ととも、多くの利用者の利便性向上やコストの削減,データ活用等によるコネクテッドカー,スマートシティ,スマート工場等々の新たなビジネス創出等が行われています。
従来の組込みシステムは、C言語で開発されますが、IoTシステムは、WEB系のシステムと連携することから、開発者の組込みシステムに対する知識量が少ないと考えています。Pythonであれば、WEB系エンジニアでも容易に開発ができるでしょう。
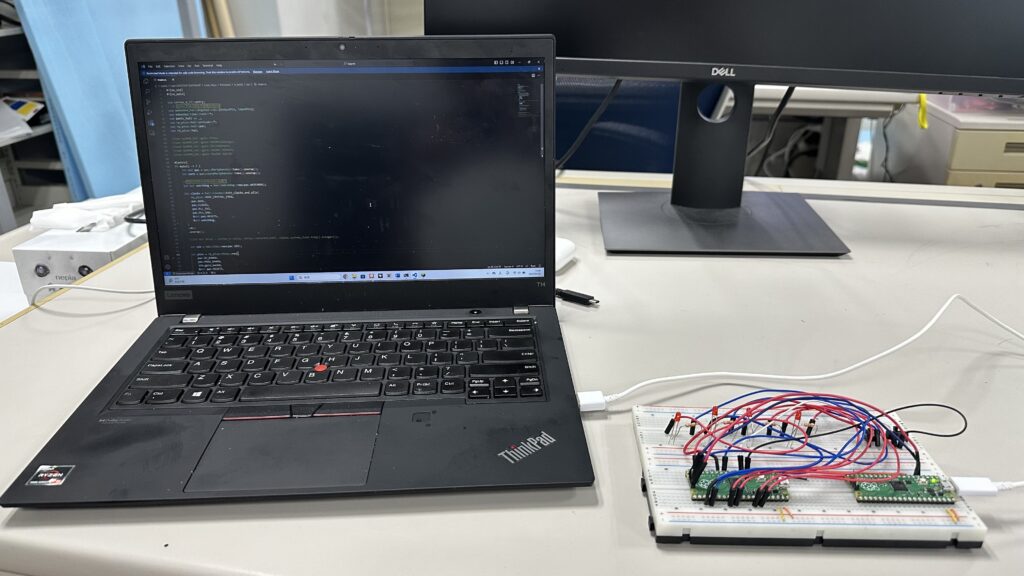
今回の研究では、バッテリーによって動くIoTシステムでは、消費電力を抑えることが要求されます。
消費電力量に焦点を当て、MicroPython(Pythonを組込み開発環境で使用)とC言語で様々な項目で評価し、組込みシステムにおけるMicroPythonの優位性について検討しています。
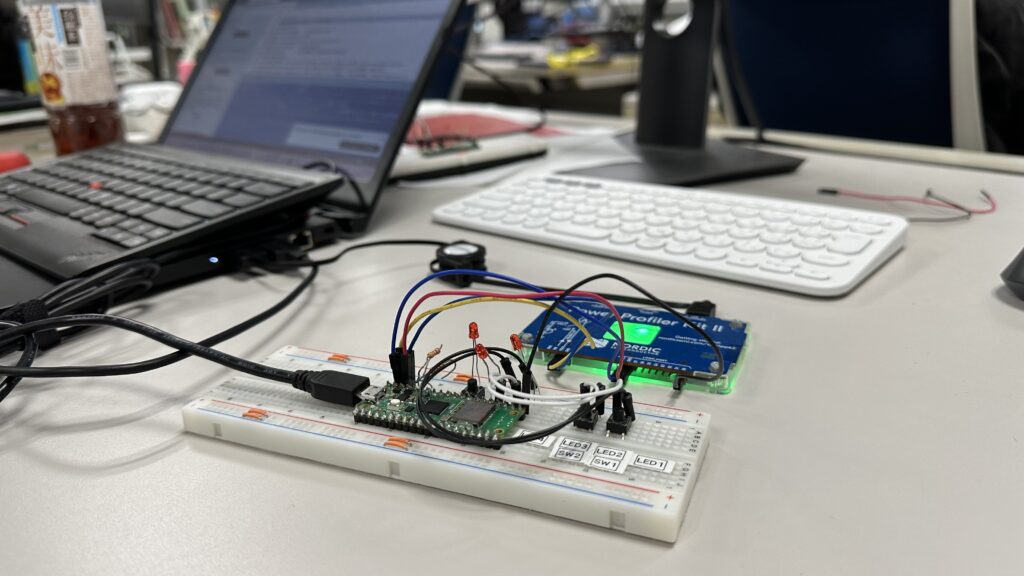
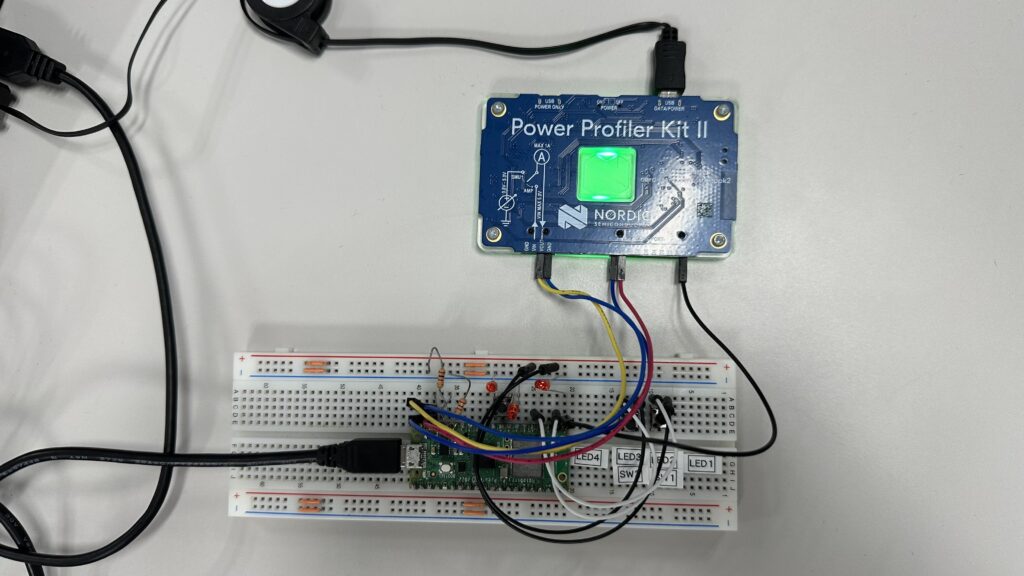
消費電力測定の様子
DDS over RPMsg on HMP
博士1年 Vincent Conus
My research focuses on implementing and utilizing the ROS2 middleware as well as micro-ROS, the real-time capable counterpart on a single chip capable of handling both criticality systems instead of utilizing two distinct board. This new integration is meant to be used on robots in order to improve control speed, tracing capability and harmony of communication systems. The current implementation is being developed on Xilinx’s KRIA board.

Comming soon
修士1年 江塚俊介
Comming soon.

– Collaborative project
本田研究室では企業との合同研究を実施しています.
合同研究には学部4年生からの参加が可能です.
本格的な参加には修士レベルのスキルが必要なため,進学を考えている学生を歓迎します.